Old Robots Playing with old robots.
(2008 - 2008)
|
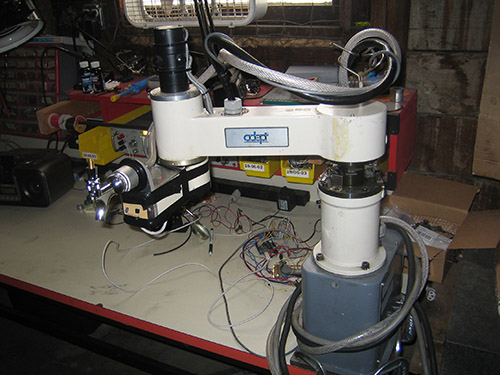



In 2007, while a graduate student I decided to search craigslist for a "robotic arm." The very first time I ever typed in those search terms up popped this Adept arm for $75 (without controllers or any documentation). I bought it immediately. I had no time to play with the arm and it sat dormant until the winter of 2009. At that point:
- I traced all of the wires to their respective sensors and motors.
- Wired a breakout board to an Arduino and a Pololu double H-bridge driver.
- Wrote an arduino-0018 based PID controller for the two dof.
- Wrote a serial packet error checking system (serial strings were not readily passed with early arduino versions).
- Wrote a simple graphic interface in Processing to drive the position of the joints.
- Integrated a IR position sensor into the manipulator.
Arduino is non ideal to run multiple dof. Eventually I would like to build an n-nodal controller with independent microcontrollers for each joint.
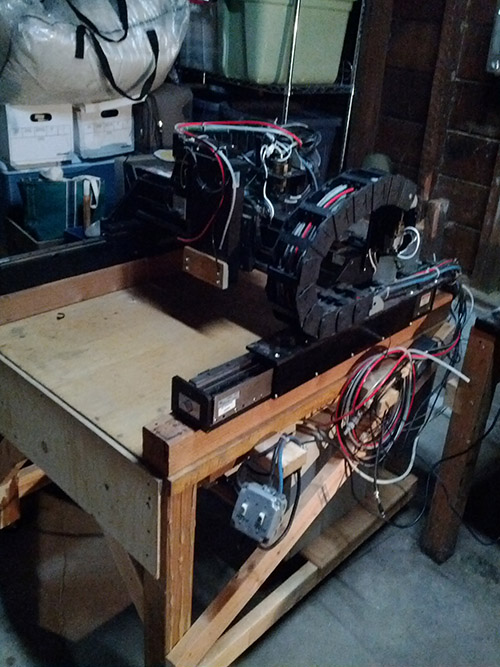
The U500 is a two axis BLDC linear motor stage with a third ball screw z-axis. This was collecting dust in an artist fabrication shop and my friend Geo let me rescue it. I had to tear it down completely to fit into the trunk of my car and through the door of my basement. I built a stand for the system and then reassembled the entire system inside my basement. The system works, as shown in the video. Except, on one dof the magnets have become delaminated. George Anwar who taught me to not fear electronics graciously has provided me with a similar but different model BLDC linear motor stage as replacement parts (the bearings were destroyed but coils intact). Eventually, I will machine an adapter and try installing the new motor, hopefully resurrecting this beautiful machine.
