
"Brackybot - underactuated, 2DOF, pendulum, brachiator"
(2015 - present)
Brackybot is an underactuated, two degree of freedom, brachiating pendulum robot, designed to traverse a 2D array of periodically placed lattice elements.
Below is demonstration of gravity compensation with the initial prototype hardware.
Below is a demonstration of gravity compensation with the full arm built. At 0:23 you'll see how it acts when we turn off the gravity compensation controller.
This is early swingup control with a simple dummy arm.
Hardware
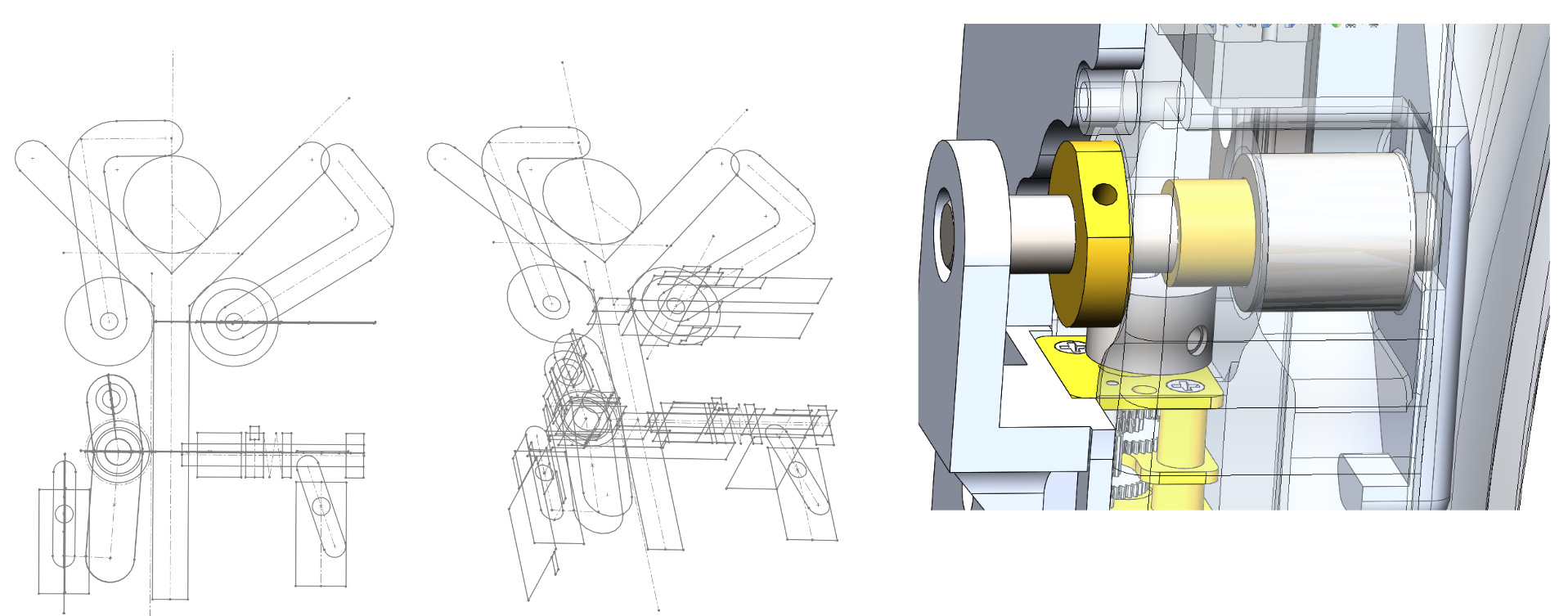
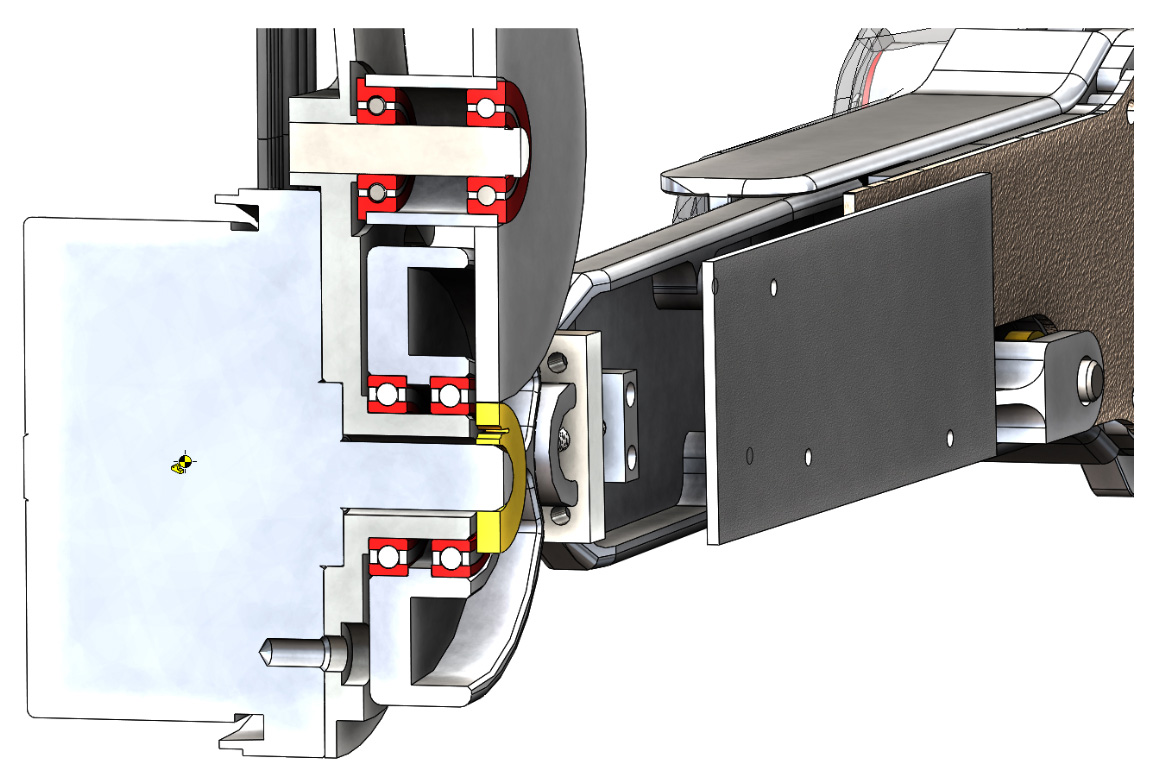
One of the major concerns with this robot was timing of the gripper action phase of the locomotion cycle. I worked through multiple iterations of gripper and latching mechanism designs. Some of these designs are shown below. I make use a master model approach to modeling in Solidworks.

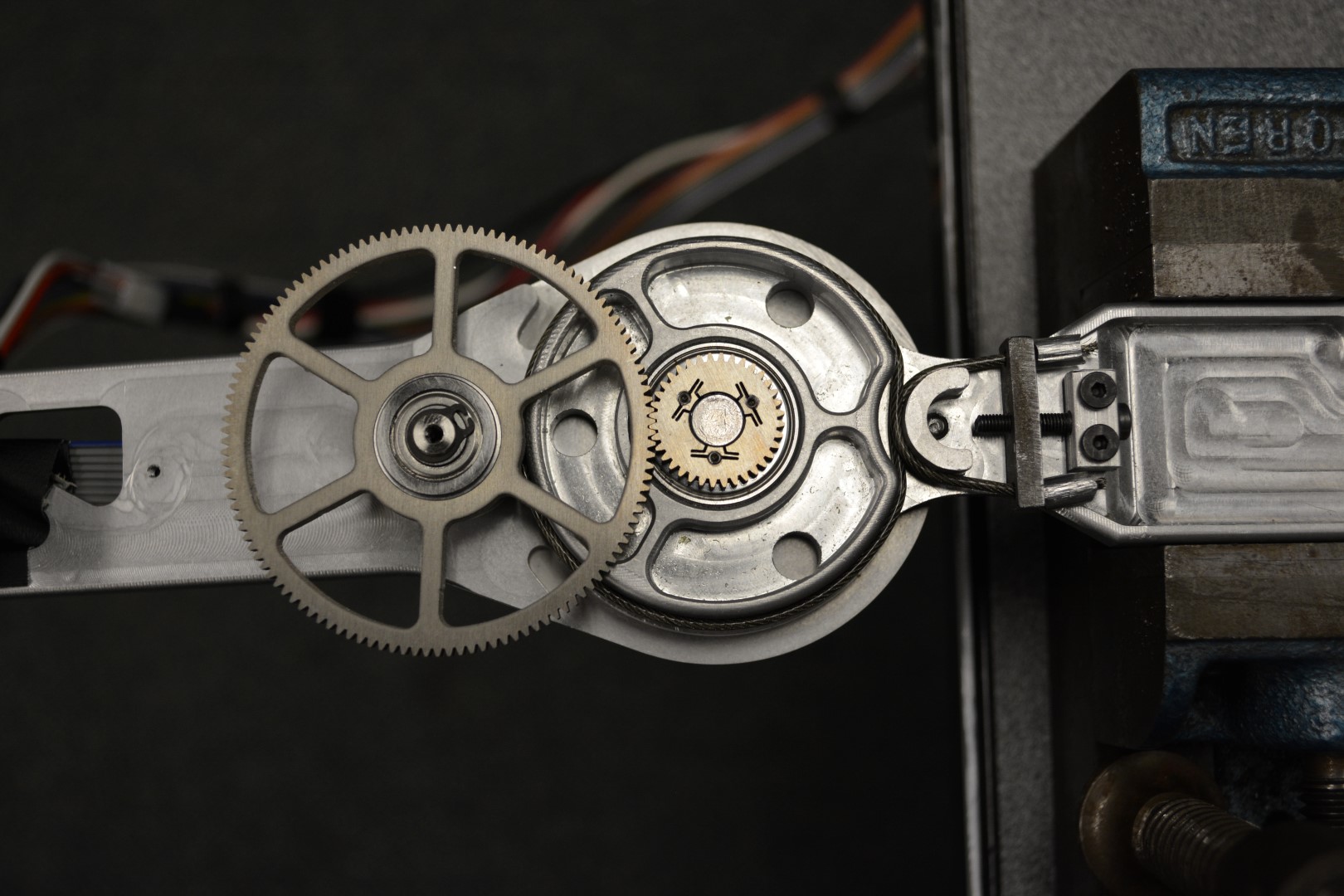
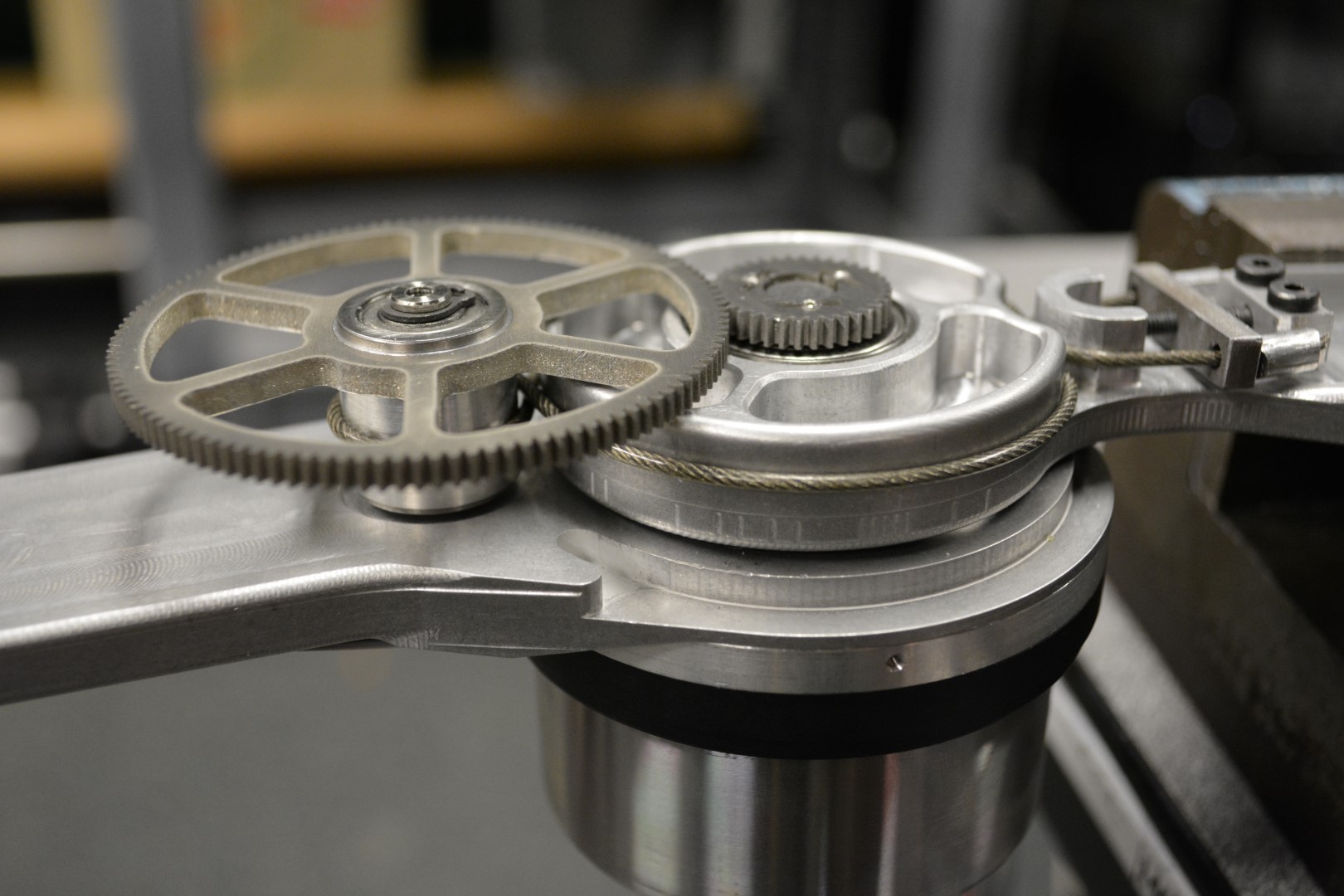
I underestimated how much torque was necessary to hold-up and swing-up the arm during obstacle avoidance. So, last minute I had to include a gear ratio into the drive system. It was too late to buy a reasonably sized gearbox, so I designed a spur gear and cable captstan drive system. Below are some images showing how it works.
To fabricate this robot I had both the 5 axis cnc and our wire edm running simultaneously. I have to say it is really satisfying to be able to start with a blank page, prototype, design, fabricate and assemble an entire working system. In this video I am machining the gripper rack and then finishing it by cutting gear teeth into it - visible in the picture below.
This little video was using Solidwork physical dynamics to help prototype the gripper geometry.
